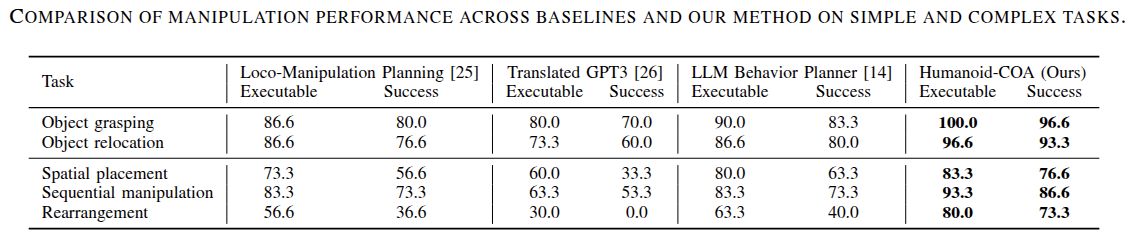
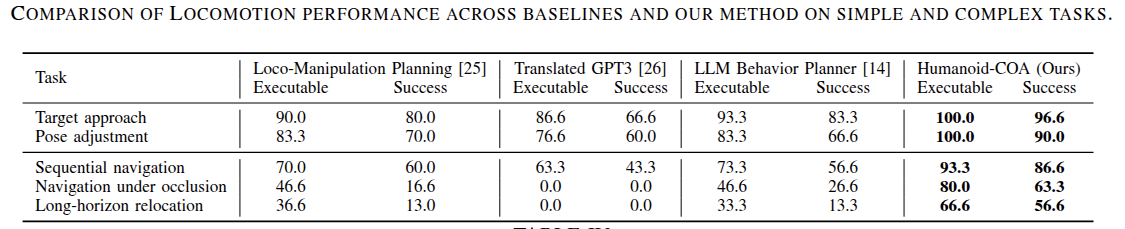

References used in performance metrics
[14] J. Wang, A. Laurenzi, and N. Tsagarakis, "Autonomous Behavior Planning For Humanoid Loco-manipulation Through Grounded Language Model," in 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 10855-10862.
[25] M. Murooka, I. Kumagai, M. Morisawa, F. Kanehiro, and A. Kheddar, "Humanoid loco-manipulation planning based on graph search and reachability maps," IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1840–1847, 2021.
[26] W. Huang, P. Abbeel, D. Pathak, and I. Mordatch, "Language models as zero-shot planners: Extracting actionable knowledge for embodied agents," in International conference on machine learning, pp. 9118–9147, PMLR, 2022.